| |
|
不到园林,怎知春色如许?
|
|


从本质上讲,半透明是一种光学特性,它能让光线全部或部分穿过材料,而不会让人清楚地看到材料背后的物体。 ...
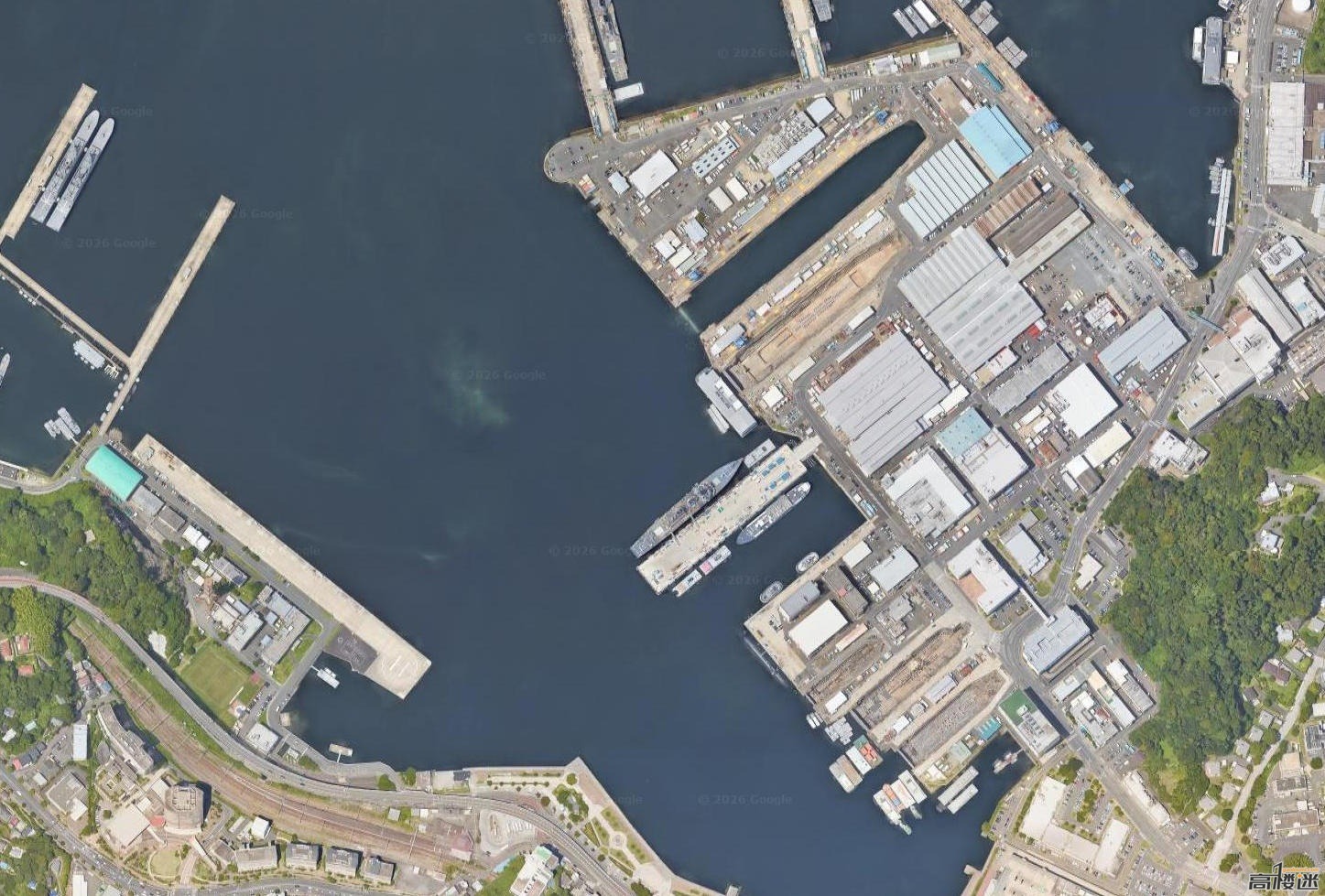
海上自卫队(主要港口与航空基地) 横须贺基地(神奈川县): 虽然主要是美军第七舰队母港,但也是海上自卫 ...

祥云小镇拥有成熟的社区商业基底与常态化公共艺术布局,场地人流密集、活动多元,是周边居民日常活动与 ...

东京代官山的DOLCE TACUBO甜品店,是由Tadokoro Architects设计。建筑主体延伸出一个木质框架,营造了悬 ...

木屋酒店坐落于贵州大山深处的深度贫困村——团结村,是当地企业在政府扶贫政策引导下,依托农业旅游助力 ...

 |Archiver|手机版|建筑蚂蚁
( 陕ICP备19013355号 )
|Archiver|手机版|建筑蚂蚁
( 陕ICP备19013355号 )![]()
GMT, 2026-5-25 , Processed in 0.095378 second(s), 23 queries .
Powered by Discuz! X3.5
© 2001-2026 Discuz! Team.